Coordenadas y proyección de vectores
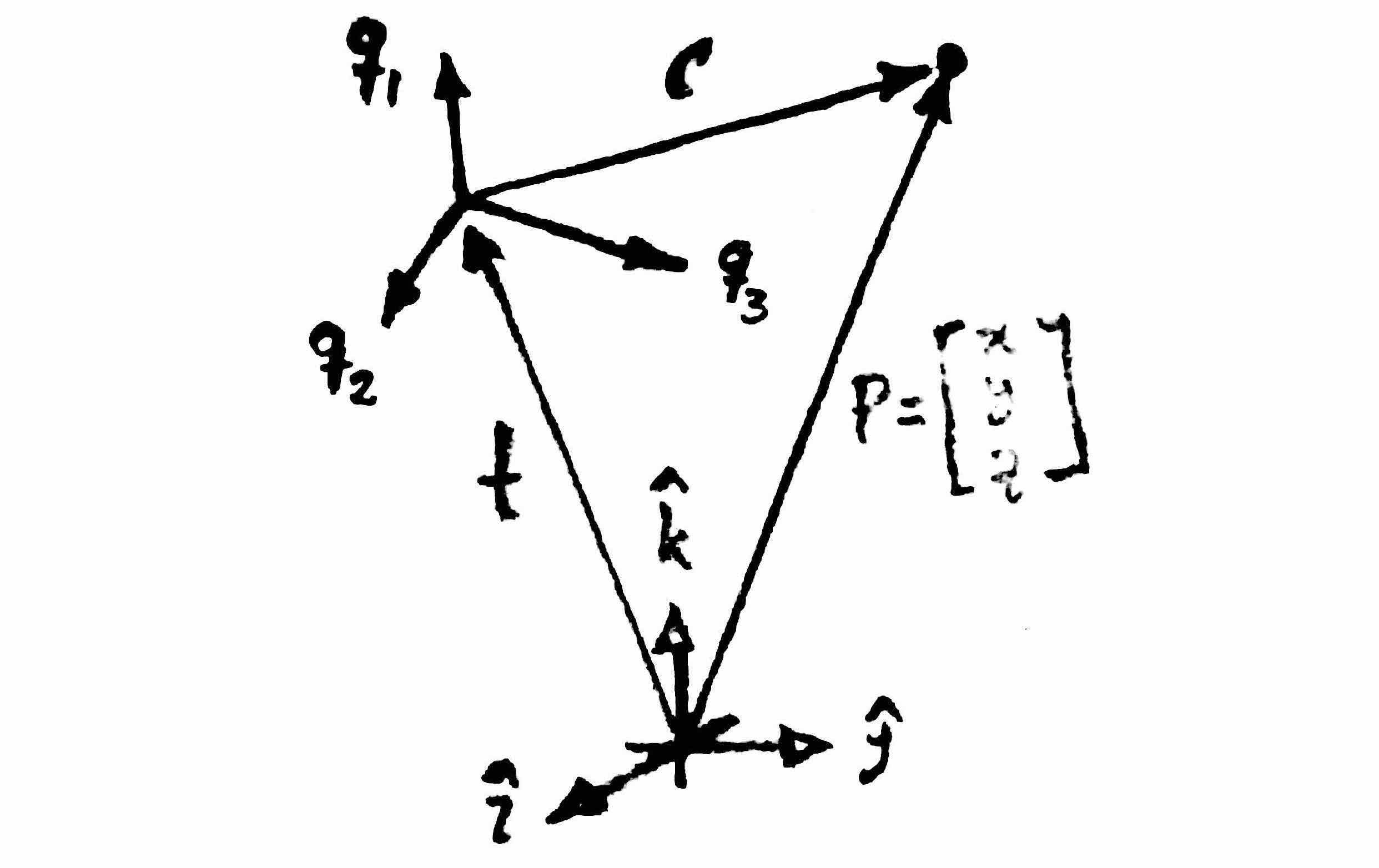
Considere un sistema de referencia global {i, j, k}, y un sistema de referencia local {q1, q2, q3} con origen en t. Si (x, y, z) son las coordenadas de un punto p desde el sistema de referencia global, ¿cuáles son las coordenadas (α, β, γ) del punto p desde el sistema de referencia local?
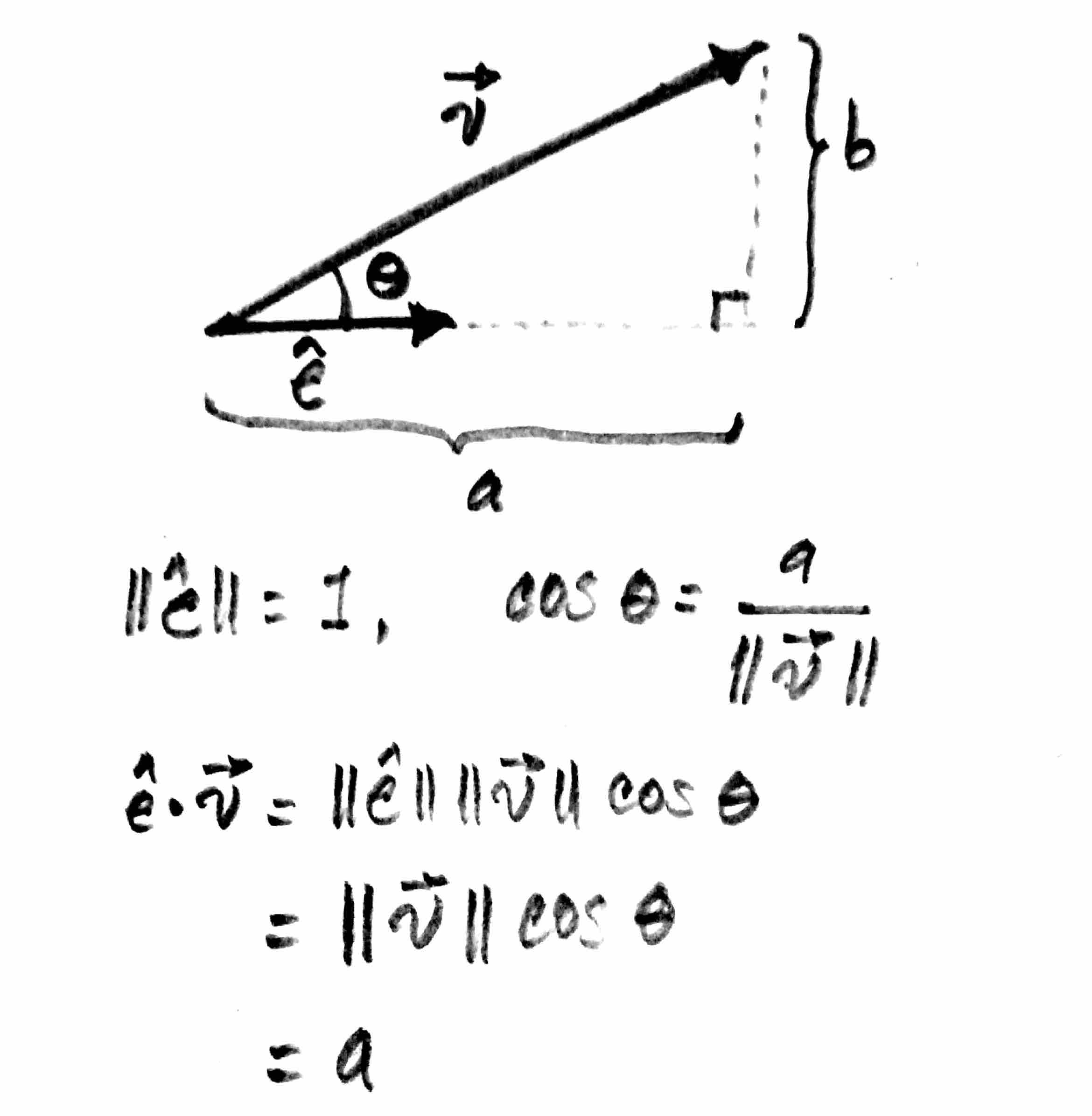
Decir que las coordenadas del punto p son (x, y, z) es equivalente a decir que x, y, e z son las proyecciones del vector p en los vectores unitarios i, j, y k, respectivamente. Esto se puede describir matemáticamente usando el producto interno como:
i · p = iTp = [1, 0, 0] [x, y, z]T = x,
j · p = jTp = [0, 1, 0] [x, y, z]T = y,
k · p = kTp = [0, 0, 1] [x, y, z]T = z.
Podemos obtener las coordenadas (α, β, γ) del punto p desde el sistema de referencia local usando un procedimiento similar. Sin embargo, se debe tomar en cuenta la siguiente observación.
No podemos proyectar directamente el vector p porque este vector indica cómo "se ve" el punto p desde el sistema de referencia global. En su lugar, debemos usar el vector c = p − t que es el vector que indica cómo se ve el punto de interés desde el origen del sistema de referencia local.
De esta forma, la coordenadas (α, β, γ) del punto p desde el sistema de referencia local se pueden obtener como:
α = q1 · (p − t ) = q1T (p − t ),
β = q2 · (p − t ) = q2T (p − t ),
γ = q3 · (p − t ) = q3T (p − t ).
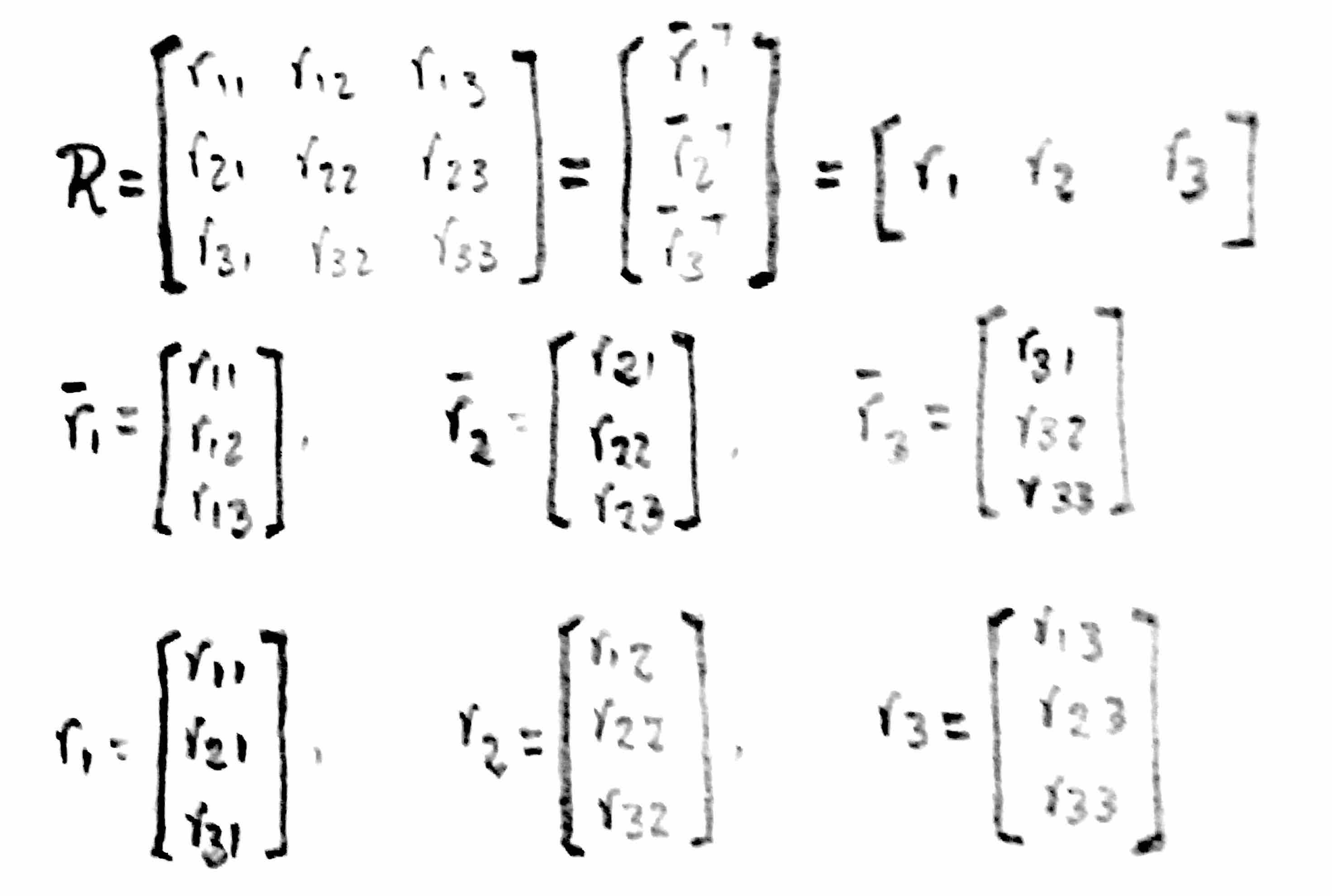
Recordando que los vectores unitarios q1, q2, q3 son iguales a las columnas de la matriz de rotación R, las coordenadas (α, β, γ) se pueden obtener como
[α, β, γ]T = RT (p − t ).