| Citation | Rigoberto Juarez-Salazar, Alejandra Giron, Juan Zheng, and Victor H. Diaz-Ramirez, “Key concepts for phase-to-coordinate conversion in fringe projection systems,” Applied Optics, Vol. 58, Issue 18, pp. 4828-4834 (2019). DOI: https://doi.org/10.1364/AO.58.004828 |
| Links | Full Article BibTeX Software More Papers |
What is it about? Español
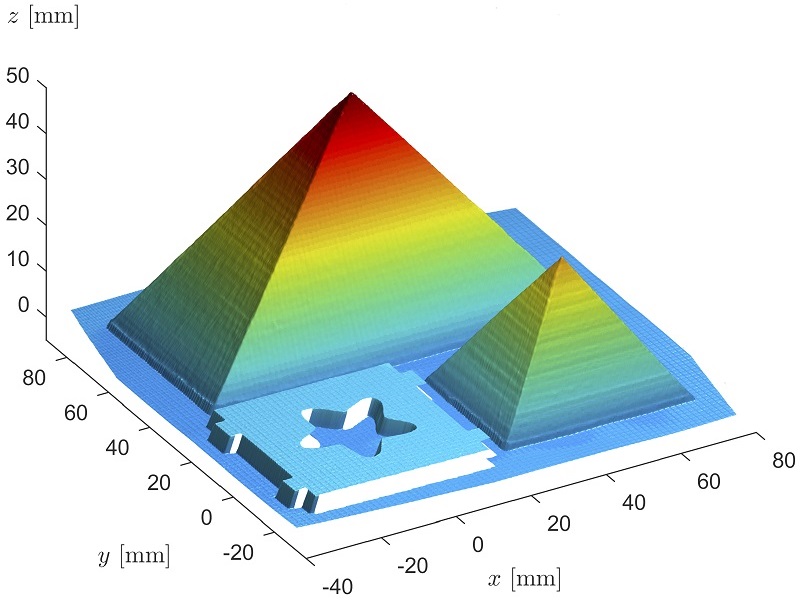
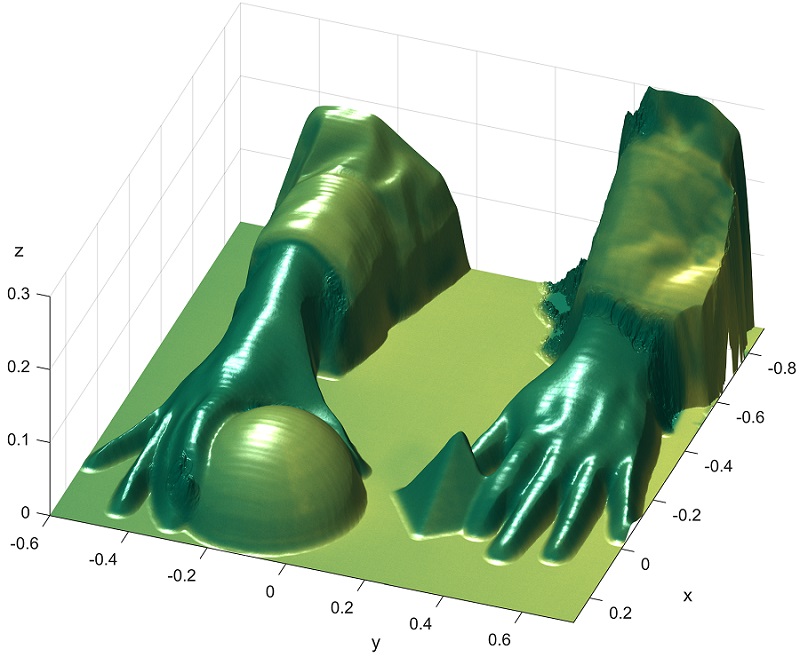
Fringe projection is a powerful method for noncontact and accurate measurement of three-dimensional objects. However, to design or optimally use a fringe projection system, the fundamental operating principles must be carefully considered. In this work, the operation of fringe projection system with the camera and projector arranged arbitrarily is modeled using four key concepts.
Why is it important?
This paper provides an insightful framework to design or implement a fringe projection system by formalizing four essential concepts. Namely, (1) cameras and projectors as direction sensors, (2) gratings as coordinate-encoding devices, (3) absolute phase, and (4) triangulation. With this approach, a generalized phase-to-coordinate conversion algorithm is straightforward to get. The derived conversion method is valid for systems with the camera and the projector arranged arbitrarily.
Perspectives
Usually, the operation of fringe projection systems is addressed assuming particular configurations. For instance, aligned devices or orthogonal projection. Moreover, critical connections between phase demodulation and calibration are not clearly established in the literature. This paper unifies important aspects of a fringe projection system in a common framework. We believe that this approach will support the development of new advanced arrangements and algorithms for fringe projection 3D surface imaging.