| Citation | Rigoberto Juarez-Salazar, Juan Zheng, and Victor H. Diaz-Ramirez, “Distorted pinhole camera modeling and calibration,” Applied Optics, Vol. 59, Issue 36, pp. 11310-11318 (December 2020). DOI: https://doi.org/10.1364/AO.412159 |
| Links | Full Article BibTeX Software More Papers |
Related papers
- Operator-based homogeneous coordinates: application in camera document scanning
- Key concepts for phase-to-coordinate conversion in fringe projection systems
- Three‐dimensional spatial point computation in fringe projection profilometry
- Are camera, projector, and camera–projector calibrations different?
What is it about? Español
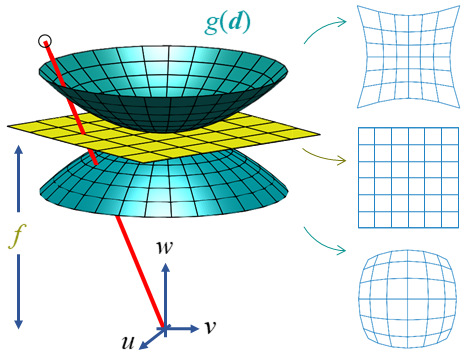
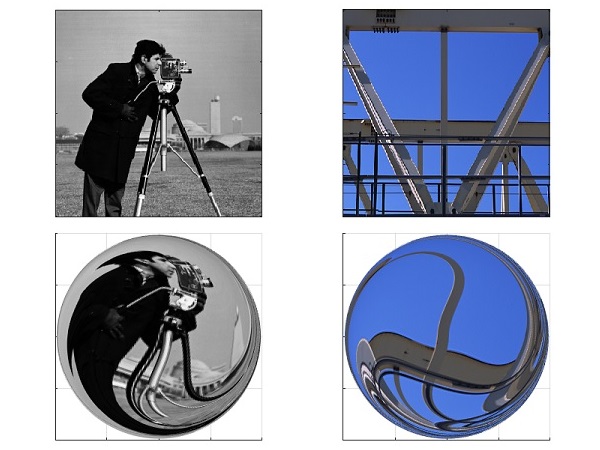
Cameras are of primary importance in modern optical systems. There are different mathematical models for specific devices; for instance, telecentric, standard pinhole, and fisheye. The various camera models prevent the design of generalized algorithms and optical systems. In this paper, a distorted pinhole camera model and its calibration method are proposed. This generalized approach includes telecentric, pinhole, and fisheye as particular cases. Thus, this approach is a versatile and accurate tool for a wide variety of modern optical metrology applications.
Why is it important?
The procedure for camera calibration varies with the specific camera model. Also, the data processing for dimensional metric computation depends on the camera model. The proposed approach unifies different camera models in a common mathematical framework. This feature allows the design of generalized data processing algorithms and optical system implementation.
Perspectives
The distorted pinhole camera allows the possibility of designing accurate advanced optical systems with multiple cameras regardless of the specific camera type.