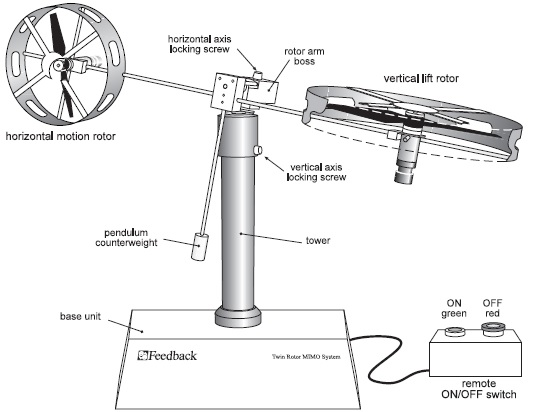
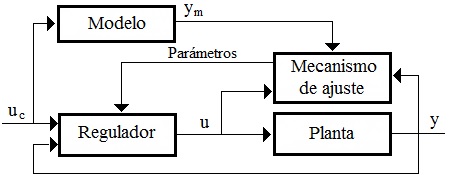
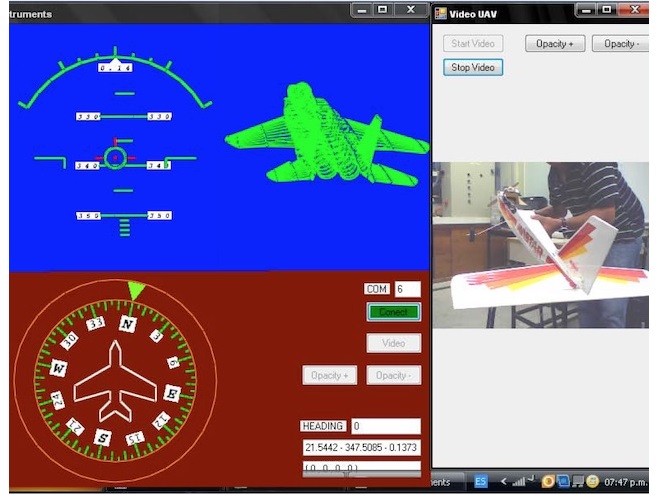
En esta tesis se presenta un controlador adaptativo por modelo de referencia para un helicóptero bi-rotor de laboratorio. Primeramente, se estudia la dinámica del sistema empleando las leyes de Newton obteniendo un sistema de ecuaciones diferenciales ordinarias no lineales. Posteriormente, se estudia el método de mínimos cuadrados recursivos con factor de olvido exponencial para la estimación de parámetros del sistema en tiempo real. Finalmente, se estudian cuatro tipos de control adaptativo por modelo de referencia y se comparan con controladores clásicos por retroalimentación de estados. Las simulaciones computacionales y pruebas experimentales se realizan empleando Matlab-Simulink con interfaz de comunicación para un helicóptero de laboratorio.
Palabras clave: Control adaptativo, Helicóptero, Ecuaciones diferenciales ordinarias no lineales, Estimación de parámetros, Mínimos cuadrados, Algoritmo recursivo, Retroalimentación de estados, Matlab-Simulink.