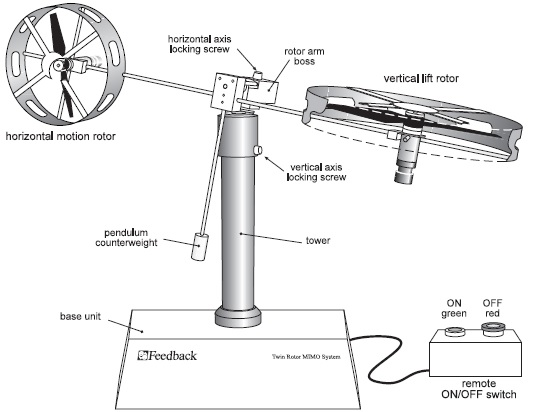
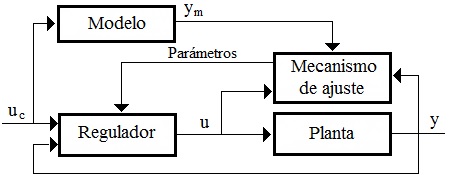
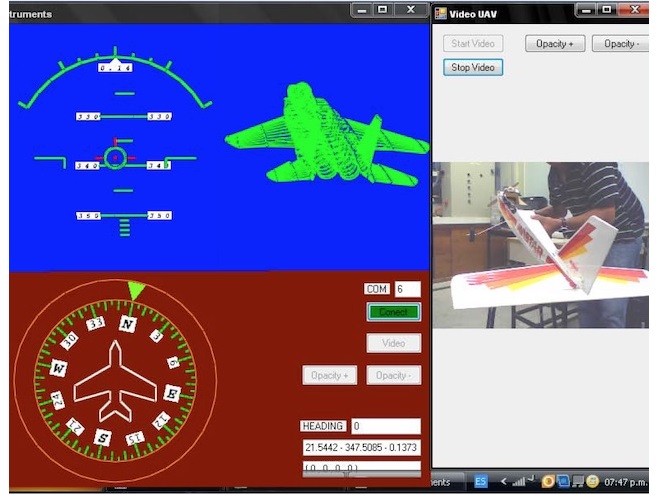
This thesis presents an adaptive controller by reference model for a laboratory twin rotor helicopter. First, the dynamic is studied employing the Newton laws obtaining a nonlinear ordinary differential equation system. Next, the recursive least squares method with exponential forgotten factor for real-times parameter estimation is studied. Finally, four adaptive controllers by reference model are analyzed and compared with a classical state feedback controller. The computer simulations and experimental tests are performed using Matlab-Simulink with communication interface to a laboratory twin rotor helicopter.
Keywords: Adaptive control, Helicopter, Nonlinear ordinary differential equations, Parameter estimation, Least squares, Recursive algorithms, State feedback control, Matlab-Simulink.