Homography estimation from a single-point correspondence using template matching and particle swarm optimization
What's it about? Español
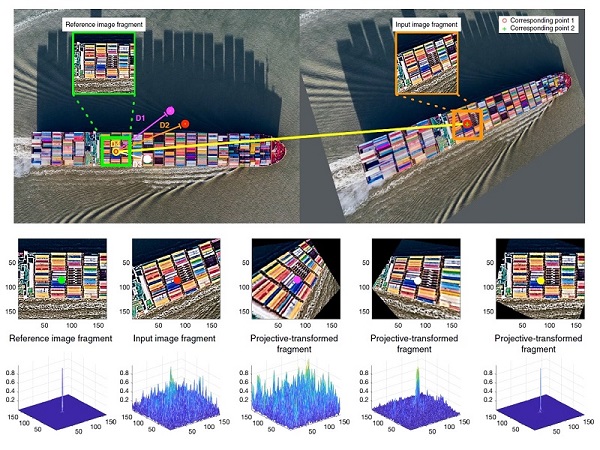
Homographies are important matrices in computer vision because they behave like distortion-free cameras when the observed objects are flat (e.g., walls, desktops, doors, windows, screens). For this reason, accurate and robust homography estimation methods from experimental images are of primary importance in computer vision applications.
Why is it important?
Conventional homography estimation methods have a theoretical limit regarding the minimum necessary point correspondences to work. Specifically, conventional methods require at least four or more point correspondences. This paper proposes a novel homography estimation method working using a single point correspondence.
Perspectives
This novel homography estimation method opens a new research field. The potential applications of this approach range from object detection and visual metrology to automatic navigation of mobile robots.