Homography estimation from a single-point correspondence using template matching and particle swarm optimization
¿De qué se trata? English
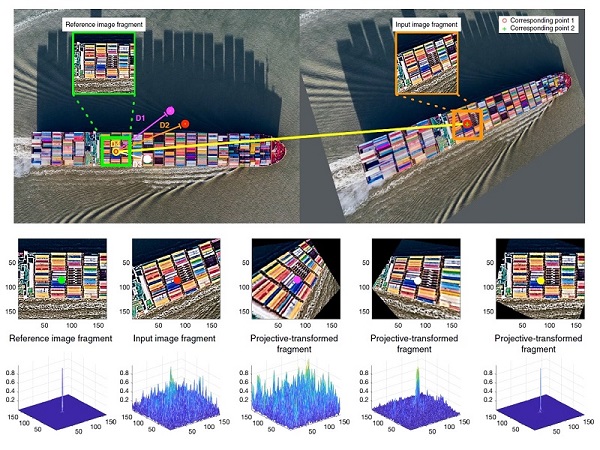
Las homografías son matrices de gran importancia en visión por computadora debido a que se comportan como una cámara sin distorsión cuando se observan objetos planos (por ejemplo, paredes, escritorios, puertas, ventanas, pantallas). Por esta razón, los métodos de estimación de homografías robustos y de precisión empleando imágenes experimentales es de importancia primordial en las aplicaciones de visión por computadora.
¿Por qué es importante?
Los métodos convencionales de estimación de homografías tienen un límite teórico respecto al número mínimo de correspondencias puntuales necesarias para trabajar. Específicamente, los métodos convencionales requieren al menos cuatro o más correspondencias puntuales. Este artículo propone un nuevo método de estimación de homografías que trabaja usando solo una correspondencia puntual.
Perspectivas
Este método de estimación de homografías abre un nuevo campo de investigación. Las aplicaciones potenciales de este enfoque van desde la detección de objetos y metrología visual hasta navegación automática de robots móviles.