| Visión computacional para instrumentación y navegación asistida usando métodos opto-digitales (2018-2020) PDF |
| Juan Zheng Wu, Maestría en Ciencias en Sistemas Digitales, Instituto Politécnico Nacional. |
| Rigoberto Juarez-Salazar, and Victor H. Diaz-Ramirez (Asesores). |
Palabras clave
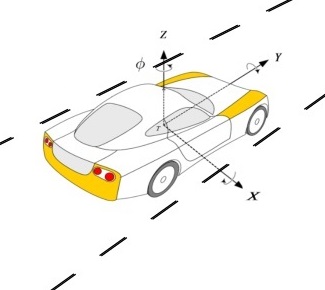
Estimación de posición y orientación, detección de carril, navegación visual, homografía, transformación geométrica, corrección de distorsión, transformada Hough, cámara pinhole, calibración de cámara, visión computacional.