Los sistemas de visión son un medio esencial de percepción tanto para los humanos como para los robots autónomos. Estos sistemas permiten la percepción de colores, reconocimiento de formas, medición de tamaños y distancias, clasificación de objetos y la interpretación de escenas. No obstante, explotar todo el potencial de un sistema de visión en una computadora digital para aplicaciones robóticas presenta desafíos significativos. Procesando toda la información visual de una escena para lograr un reconocimiento y localización robustos de objetos sigue siendo un problema abierto de gran interés.
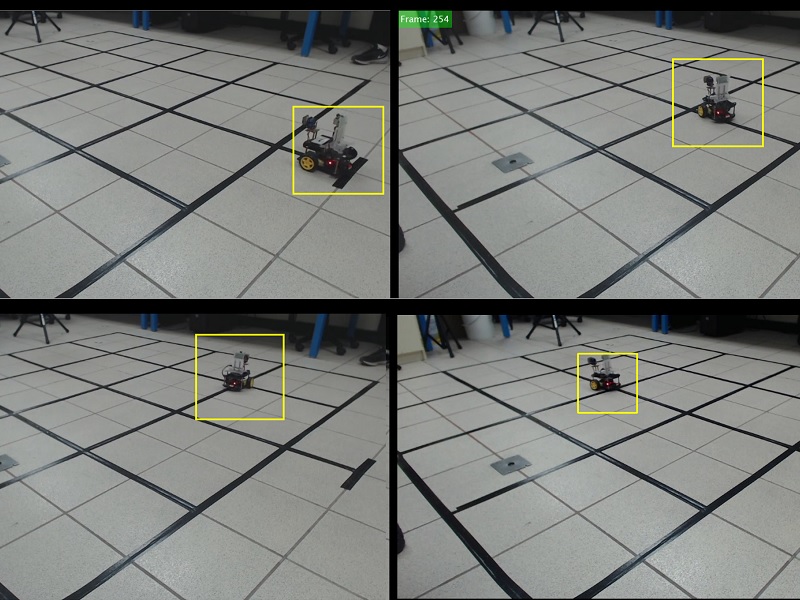
Las escenas naturales son datos multidimensionales que deben ser extraídos utilizando diversos tipos de sensores. Los sistemas opto-digitales facilitan la creación e interpretación de datos mediante algoritmos de alto rendimiento. Además, las cámaras digitales ofrecen ventajas significativas, como un amplio campo de visión, mediciones de alta resolución, bajo consumo de energía y costos reducidos. En esta tesis, se propone un algoritmo de navegación por retroalimentación visual usando métodos de procesamiento multidimensional. El vehículo terrestre realizará una rutina dentro de una plataforma digital, y se corregirá su trayectoria usando la información visual obtenida por las imágenes capturadas por el sistema.