| Citation | Rigoberto Juarez-Salazar, Juan Zheng, and Victor H. Diaz-Ramirez, “Distorted pinhole camera modeling and calibration,” Applied Optics, Vol. 59, Issue 36, pp. 11310-11318 (December 2020). DOI: https://doi.org/10.1364/AO.412159 |
| Links | Full Article BibTeX Software More Papers |
Related papers
- Operator-based homogeneous coordinates: application in camera document scanning
- Key concepts for phase-to-coordinate conversion in fringe projection systems
- Three‐dimensional spatial point computation in fringe projection profilometry
- Are camera, projector, and camera–projector calibrations different?
¿De qué se trata? English
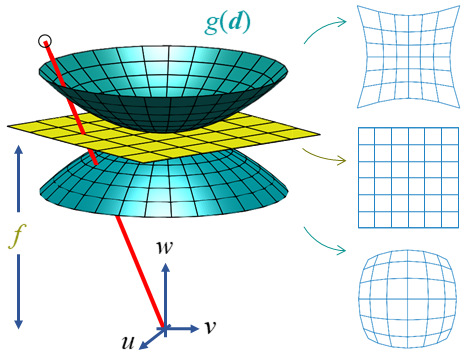
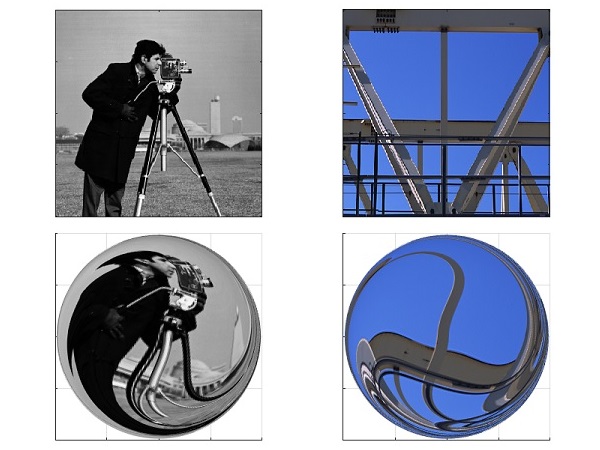
Las cámaras son de gran importancia en sistemas ópticos modernos. Hay diferentes modelos matemáticos para dispositivos específicos; por ejemplo, telecéntricos, pinhole estándar, y fisheye (ojo de pescado o cámara de campo visual amplio). La existencia de varios modelos de cámara evita el diseño generalizado de algoritmos y sistemas ópticos. En este artículo se propone un modelo de cámara pinhole con distorsión y su correspondiente método de calibración. Este enfoque incluye el modelo de cámara telecéntrico, pinhole, y fisheye como casos particulares. Así, este enfoque generalizado es una herramienta versátil para una amplia variedad de aplicaciones de metrología óptica moderna.
¿Por qué es importante?
El procedimiento de calibración de cámara varía de acuerdo con el modelo. También, el procesamiento de datos para cálculos métrico-dimensionales depende del modelo de la cámara. El enfoque propuesto unifica diferentes modelos en un marco matemático común. Esta característica permite diseñar algoritmos de procesamiento de datos generalizados y su implementación versátil en sistemas ópticos.
Perspectivas
El modelo de cámara pinhole con distorsión permite la posibilidad de diseñar sistemas ópticos avanzados con múltiples cámaras sin importar el tipo específico de los dispositivos.